|
Gus Jansson / Alegomazer | |
| Alegomazer Back to Gus Jansson’s Lego Home Page On April 30, 2001, the Seattle Robotics Society hosted a robot exhibition and competition called the Robothon 2K+1. I built Alegomazer to compete in the Line Maze contest. Note, this was not a Lego only event. As a matter of fact, my robot was the only Lego robot entered in this event. 
Summary of the rules The goal was to build a robot that can solve a maze consiting of 1/4” black lines on a white surface. Unlike a traditional paper and pencil maze, the robot is supposed to drive on the lines, not in between them. The maze consisted of 90 degree turns, T intersections, 4-way intersections, dead-ends, and a finish marked by a 6” diameter circle. The rules also stated that no two intersections would be less then 6” apart. The robots got three tries to complete the maze. Each try was limited to three minutes. After 3 minutes, the robot had to come to a stop or it was disqualified. After each run, the robot was placed at the beginning of the maze for its next run. Since the robots get multiple chances to run the maze, the robots had an oppertunity to learn from each run. The robot able to complete the maze in the shortest amount of time, won. Official Line Maze Rules The Results Alegomazer won! This turned out to be a very difficult problem. Even though 11 robots were registered for the event, only 6 robots were ready on the day of the competition. Because the organizers were concerned that no robot would be able to complete the maze, in the last minute they decided to reduce the size of the maze from 12’ by 12’ to 12’ by 4’. Even with the reduced size maze, of the 6 robots, only three completed the maze. Alegomazer managed a narrow victory, completing the maze in 33 seconds on its second run compared to 35 seconds of the 2nd place robot, LineMax. Photos from Robothon
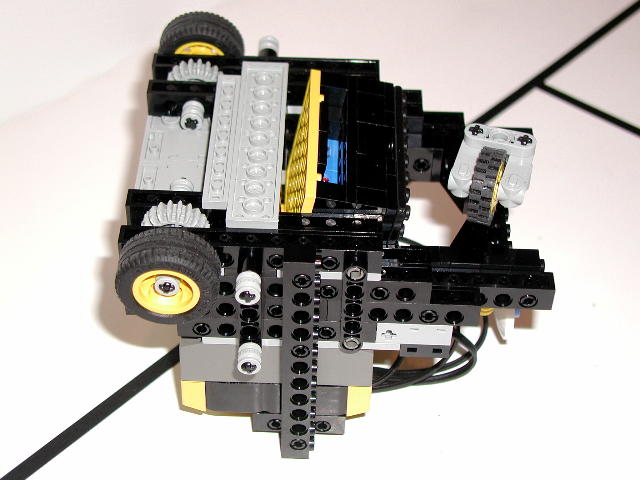
Alegomazer Many people, including myself, had doubts if was even possible to build a reliable 1/4” line tracking robot with Lego Mindstorms, not to mention solving a maze as well. The first task in building this robot was to come up with a way of mounting the light sensors so that I could track this narrow line and be able to detect intersections. My solution was to mount the sensors in a small triangle pattern with one light sensor in front and two light sensors side-by-side right behind it. Then I shrouded the sensors with bricks and plates so that the front sensor had a fairly large 2L by 1.2 rectangular oppenning. The back two sensors were shrowded so that they shared a slit 6L by .8 L. Note: 1L is the standard distance between studs on Lego bricks. Photos and description off the Light Block assembly
|
|
Primary content in this document is © Gus Jansson. All other text, images, or trademarks in this document are the intellectual property of their respective owners. |
| |
©2005 LUGNET. All rights reserved. - hosted by steinbruch.info GbR |