|
|
| |
In lugnet.robotics.codepilot, Philippe Hurbain wrote:
> Dr. Soubhi Sabbagh contacted me recently to get information on Code Pilot, and
> collecting various sources he was able to analyse and create a PDF code sheet.
Alex Christensen posted a PDF file with these same bar codes back in February of
2007:
http://base.google.com/base/a/1179858/D12992673140563399012
He based his work on Doug Eaton's extremely helpful VLL page:
http://www.elecbrick.com/vll/
John Hansen
|
|
| |
Hi all,
Thank you if you completed the survey about your chosen development environment.
Early results are as follows:
48% of respondents use NQC as their main language.
NQC scores 1.6 for usefulness, 1.5 for ease of use and 2.1 for enjoyment. (1 is
the best, 6 is the worst).
18% use Robolab
Robolab scores 2.2 for usefulness, 1.6 for ease of use and 1.5 for enjoyment.
18% use brickOS/C
6% use RCX-code
9% use Java
90% of respondents have been male. The average age of all respondents is 38.
No further analyses have been performed yet.
There is still time to complete the survey at:
http://www.nottingham.ac.uk/~liztc/RobotSurvey.html
Thank you,
Thomas
|
|
| |
Hi,
I am very interested (for a variety of reasons) in which programming language
people are using to build robots. I wonder if you would fill in a questionnaire
about it at:
http://www.nottingham.ac.uk/~liztc/RobotSurvey.html
It's all about how useful, easy and enjoyable your chosen language is.
If anyone does, I will summarise the results on a web page and post up the URL.
Thank you
Thomas
|
|
| |
Here’s my drawing of the Code Pilot light sensor circuit:
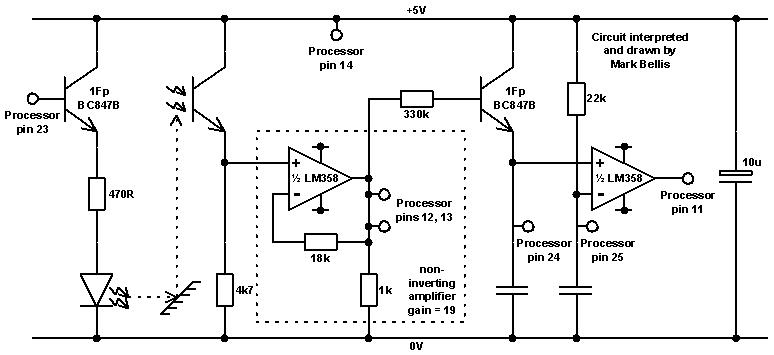
Looking at the components used, there’s no reason why a similar circuit couldn’t
be used as an RCX sensor, though I see the real one is more sophisticated:
http://www.plazaearth.com/usr/gasperi/light.htm
In the Code Pilot, the processor controls the LED via the top left transistor.
470 ohms is a typical value to use with a 5V supply, giving just over 10mA to
the LED. Many IR communication devices use a much higher pulsed current at low
duty cycle, but the Code Pilot light sensor is designed for close range use with
the bar code sheet or tacho wheel, so this is unnecessary.
The first half of the LM358 dual op-amp is a non-inverting amplifier with a gain
of 19 (1+(18k/1k)). The processor can either use the ac signal or pass it on to
the second half of the op-amp, which is used as a comparator. Here the
capacitors remove the ac component of the signal, so that the output doesn’t
oscillate.
Perhaps the comparator is used with the wheel VLL codes, since the reflected
light from a wheel at standard distance is a known amount and therefore produces
a known signal so that the comparator threshold can be set mid-way between the
two signals from a reflective part of the wheel and from a gap in the wheel.
The 5V supply is provided by an LM2936M-5 voltage regulator - a 3-pin regulator
in an 8-pin SOIC package, using four pins for ground.
PLMKWYT
Mark
|
|
|