|
|
| |
We had a very interesting BrickHeap Wars competition at our September meeting.
Following the meeting we voted on our mini-challenge for the October meeting
which will take place in two weeks, on October 26th. The meeting runs from
2-5pm, and we'll be meeting in the Gibran room.
The mini-challenge we picked was "Candy Bot". Build a robot that somehow makes
use of candy. Use your imagination. Robots are not limited to these ideas, but
you might do things like give candy away (it's Halloween soon after the meeting)
or sell it. Perhaps they can throw it, or if you can figure out how to, you
might use the candy as a power source.
Hope to see you soon!
--
David Schilling
|
|
| |
We had a great second-chance sumo competition at our May SMART meeting. We voted
on building a Space Elevator ribbon climbing robot for our June meeting. The
June meeting will be on the 29th, in the Michelangelo room.
Build a robot that can climb a ribbon. The ribbon I'll be bringing is a 3" wide
woven nylon "Caution" tape that I bought at Home Depot. If you want to get some
of your own, you can get it for under $20. Look for 500’ Heavy Duty Reinforced
Caution Tape", Empire manufacturer, SKU 719-282, usually in the tool aisle at
Home Depot.
The motivation for this is that there are two space elevator competitions coming
up this summer. For the mini-challenge, anything that can climb a ribbon is
great. If you want to see the rules for the competition, you can find them at
http://www.isec.org/sec/index.php/family-science-fest.
See you at the next meeting!
--
David Schilling
|
|
| |
We had a great meeting in March with more robots than we've seen in a while. The
challenge was to build a sorting robot, and there were a couple of really good
ones! I was very impressed with what people came up with.
This month’s mini-challenge is to build a sumo robot. The distinguishing feature
this time is it will be 3-way sumo. That is, there will be three robots on the
ring at the same time.
Our build rules (since it’s a competition, and not entirely free build) is that
robots must weigh under 3 pounds, and may not be larger than 12”x12” at any
time. They must be built entirely out of LEGO using standard building
techniques, and you may not intentionally damage an opponent.
The arena will have a white surface with a narrow black rim. I think Mark said
his arena is a 4’ wide octagon.
That’s it. Have fun!
Mark Kenworthy will be running the meeting as I'll be out of town.
--
David Schilling
|
|
| |
The mini-challenge for the next SMART meeting, to take place at 2pm on March
30th, at Digipen as usual, and back in the Michelangelo auditorium, is to build
a sorting robot.
You can chose which item to sort, and whatever sorting criteria you like.
Sorting by size or colour are two obvious choices. Also sorting LEGO bricks or
other pieces are obvious choices. But who says you have to pick obvious choices?
I had a conversation with someone that you could sort by smell if you wanted.
Don't have a clean t-shirt? Send your robot to the laundry pile to pick out the
least smelly shirt for you to wear today. (Or you could just do the laundry.
Ever think of that?)
Have fun! Hope to see you at the next meeting!
--
David Schilling
|
|
| |
We had a great meeting today! Seven teams showed up for the Build On The Spot
competition. I guess it was harder than it seemed, but everyone had a robot,
even if they didn't score too consistently.
FOUR teams tied for first place! Great job, everyone!
For next month, we'll be meeting in the same room we were in today. The
mini-challenge we voted on was to build a "Facilities Robot", a very open ended
challenge. The idea is to build a robot that you would see in some large
institution. It can be anything. A mail delivery robot, a floor cleaning robot,
a robot that runs the elevators, a robot that opens doors, a robot that serves
meals, or makes beds (if it was a hospital, for instance), a robot that takes
out the trash, whatever you can think of. Have some fun with this one.
We'll see you on February 23rd.
PS: If someone accidentally left with one of the cubes I built for today's
challenge, could you contact me directly? (Don't forget to remove the spam bot
from the email address.) I'll arrange a time to come pick it up. Thanks!
--
David Schilling
|
|
| |
Last minute reminder about the SMART meeting this Saturday. The meeting starts
at 2pm. Since it's a Build On The Spot competition, you'll probably want as much
time as possible. I recommend arriving a couple of minutes before the meeting
starts to find the new room (we'll be meeting on the second floor in Hokusai, go
up the stairs in the lobby, down the hall to the left and in the last bend in
the hall you'll find the room. You should see Archimedes and Galileo on the
way.)
I'll announce the challenge at 2pm, sharp, and you'll have until around 4:30 to
build, program, and test your robots. Then we'll see who came up with the best
solution!
Bring an edge-tracking robot driving base, extra pieces, your laptop, and
whatever else you think you might need for the competition. Make sure your
laptop batteries are charged! I can't promise there are any outlets available in
the new room, as I've never seen it before. You might also want to make sure
your robot's batteries are fully charged!
See you in a couple of days!
--
David Schilling
|
|
| |
On New Year's EV3 I came up with a good challenge for our Build On The Spot
competition. I just wanted to remind everyone that it will take place in just
under 3 weeks, and look forward to seeing you all there! A line tracking driving
base would definitely be a good idea to have working before you come to the
event.
Happy New Year, everyone; I look forward to seeing you on the 26th!
--
David Schilling
In lugnet.org.us.smart, David Schilling wrote:
> Our last SMART meeting was decent, but we missed all the people who couldn't
> make it. Hope that you can all attend the next SMART meeting, this January
> (assuming the world doesn't end four days before Christmas!)
>
> At the next meeting we will have a Build On The Spot competition -- the
> challenge will be announced at 2pm sharp, and you'll have the next couple of
> hours to build and program your robot. Bring your LEGO, laptop, and lots of
> energy for the competition. Having a driving base, and perhaps some line
> tracking code might be useful, which is not to say that the actual challenge
> will involve these, though.
>
> See you in January!
>
> --
> David Schilling
|
|
| |
Our last SMART meeting was decent, but we missed all the people who couldn't
make it. Hope that you can all attend the next SMART meeting, this January
(assuming the world doesn't end four days before Christmas!)
At the next meeting we will have a Build On The Spot competition -- the
challenge will be announced at 2pm sharp, and you'll have the next couple of
hours to build and program your robot. Bring your LEGO, laptop, and lots of
energy for the competition. Having a driving base, and perhaps some line
tracking code might be useful, which is not to say that the actual challenge
will involve these, though.
See you in January!
--
David Schilling
|
|
| |
First, a tremendous thank-you to all the people who helped with robots at
BrickCon last weekend! Mark’s fine balancing robots were very cool to watch, and
Gus’ shooting gallery always had a line of people wanting to try it out, and his
Ranat player kept people entertained. But also a special thank you to Andrew,
and Alex. Andrew NXT-ified a wonderful LEGO mini-fig that waved at people coming
by, and greeted them, and Alex had a cool dancing robot (sadly the only on
there) and a very interesting vehicle with large wheels that people could try.
At our last meeting we voted on building a “target acquisition” robot. Build a
robot that can find a target. You could either make this a shooting target, or a
moving vehicle that finds a target. Especially cool would be a robot that
acquires a moving target, whether shooting, or catching.
Make sure, if you build a shooting robot, that it is safe. We don’t want to hurt
anyone, or damage the facilities. So nothing that shoots anything dangerous, or
that shoots its projectiles too fast, or too high (remember the ceiling!)
To make sure that your robot is actually a robot, and not a mechanical device,
you should build it so that someone else can place the target, and your robot
will still be able to acquire it!
See you in two weeks!
--
David Schilling
|
|
| |
Our next SMART meeting is in two weeks, on September 29th. We'll meet in the
Michelangelo room of Digipen, from 2-5pm.
The mini-challenge is to build a dancing robot.
It must be able to do four actions:
- turn left 90-degrees
- turn right 90-degrees
- move forward six inches
- and do some special action
The first three commands should be as accurate as possible, and need to be done
in 3 seconds or less, and the special action needs to take 10 seconds total, and
it needs to be back in the starting position when done. Think of the special
action as a little jig that it does. It can spin, twist, wiggle, whatever you
want as long as there is some movement involved. For testing purposes, write
four separate little programs using NXT-G to do each of the actions.
At the meeting we'll create a combined program that will link all these actions
together so that all the robots can all dance in sync with one another.
See you in two weeks!
--
David Schilling
PS: There won't be a competition at BrickCon due to lack of interest. If you are
planning on bringing a robot for display, though, please email me within the
next week. Don't forget to remove the spambot from the address!
|
|
| |
At the last SMART meeting I mentioned that I would consider hosting a couple of
robot competitions at BrickCon (October 5-7th) if there was enough interest.
Note: I won’t do a competition if there’s less than four competitors for that
particular event. So if you plan on attending, and participating in the
competition, please let me know as soon as possible so I can post the complete
rules for the events we’ll actually be running.
The competitions will be run Friday evening, and after public hours on Saturday.
Very likely there will be (modest) prizes for the competitions.
The following are the three events I was considering. Full rules for each event
will be posted as I get acknowledgement from enough people that they are
planning on entering the competition. In the meantime, short descriptions:
Line Tracking:
==============
Build a robot that will follow a self-intersecting line similar to the one we
had as our March mini-challenge. The parameters, but not the shape of the line
are specified as follows:
http://www.brickshelf.com/gallery/David/SMART/Samples/Arenas/line-track-parameters.png
Robots will have a certain amount of time to see how far they can go.
Sumo:
=====
Build a robot that will push its opponent out of a 3-foot diameter sumo ring.
The ring has a 2” black border.
An example of how the arena is set up can be seen here:
http://www.brickshelf.com/gallery/David/SMART/Samples/Arenas/samplesumostartingpositions.gif
Ball Gathering:
===============
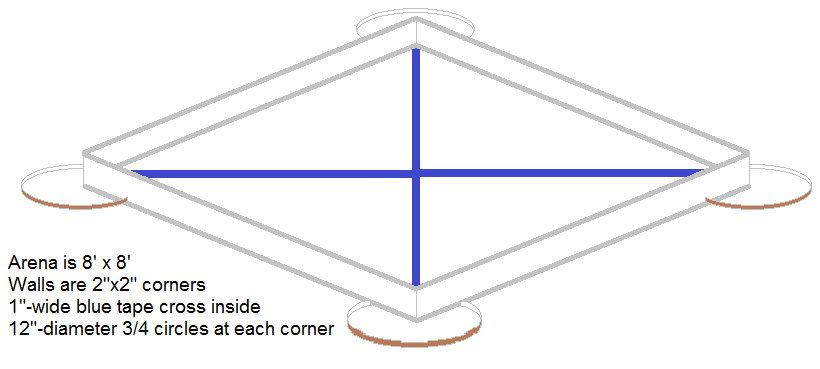
Build a robot that will pick up DUPLO balls from an 8’x8’ arena, either keeping
them on the robot, or depositing them in their starting corner. In the robot
blue balls score 10 points each, red balls 2 points each, while yellow balls
only score points (5 points each) when dropped over the edge in the robot’s
starting corner.
http://www.brickshelf.com/gallery/David/SMART/Samples/Arenas/ballgathering.png
If there is sufficient interest, I will run two classes of each competition.
First, a single “NXT-kit only” class. Second, an “any LEGO and custom sensor
allowed” class. The default class if I only get a few entries will be the “any
LEGO” class. Building restrictions including size and weight restrictions will
be in the official rules, once I get enough people interested in an event. But
you can start sooner by making your robot modest (not too big or heavy; no
gluing, modifying pieces, etc).
--
David Schilling
PS: There is no SMART meeting this weekend.
|
|
| |
Here's your two week reminder for our next SMART meeting. We'll meet in our
usual location at Digipen, in the Michelangelo room, from 2-5 pm.
In honor of Alan Turing’s 100th birthday (this coming Saturday), one of the
mini-challenges is to build some sort of a computing device. This could be
anything from a single logic gate, to a full fledged computer of some sort. I
just saw a video of someone who actually built a binary Turing Machine, which
you can watch for inspiration, if you like:
http://www.geek.com/articles/geek-cetera/the-father-of-all-lego-computers-the-lego-turing-machine-20120618/
The alternative mini-challenge is to build a robot that imitates an animal.
I hope you can all make it; see you in two weeks!
--
David Schilling
|
|
| |
We had a GREAT time at Robothon today! For the first couple of hours we were
putting together our ball contraption, and the crowds weren’t too heavy yet, but
they enjoyed watching the progress, always anticipating what the rest would look
like when it was added too. Soon we had everything pretty much working, and just
in time too, because that’s when the crowds really picked up. Or at least that’s
how it seemed to me. Maybe I was just too busy building to notice them much
before then.
Anyway, thanks to Dan for the hoppers, Alex and Natalia for the ball sorter,
(and Alex for building another ball device on the spot in about 20 minutes when
we needed it), Doug for helping with random “glue” logic between the sorter and
the next device, Andrew for the stair ball lifter. Also, thanks to Mike for
bringing a really cool remote control robot. Mike took a bunch of pictures,
which you can enjoy at:
https://picasaweb.google.com/104667803940601062545/Robothon2012
He asks that you please link to them rather than copying or repost them.
It was great seeing some of the other SMART people there, including some that I
haven’t seen in several years! That’s what I like about Robothon: you meet so
many cool people that are really into robotics of every sort, and run into many
old friends there as well.
At the SMART meeting last weekend mostly we were just preparing for Robothon. We
voted on the next mini-challenge. The vote was evenly split between building a
mechanical computer (in honor of Alan Turing’s hundredth birthday) or building a
robot that imitates an animal. So do which ever you like. You’re always welcome
to bring whatever robot you happen to be working on.
For the mechanical computer idea, chose any level of complexity you want.
Anything from a NAND gate (or any other logic gate) to a full Turing Machine.
--
David Schilling
|
|
| |
We had our meeting on Saturday, and while the turnout wasn't as big as a couple
of the previous meetings, we had a number of really cool Easter egg collecting
robots, and some new people showing up to check out what we do.
For our next meeting, April 28th, we chose two mini-challenges. First, build a
two-legged robot that actually IS a robot: it somehow reacts to its environment,
or does something that isn't entirely mechanical. IE: It's not something that
could have the NXT replaced by a battery box.
The second challege is to build some sort of device that will be useful in a
BallMageddon contraption. A ball lifting mechanism, (which might be mechanical,
but that's okay for this!) or some other sort of device that would be useful:
arms, sorters, whatever.
See you April 28th!
--
David Schilling
|
|
| |
We had a great meeting last Saturday, with lots of really good line-tracking
robots. The people there voted to do the line tracking competitively, so here
are the results:
For a straight line:
1st: Kyle (34.9 seconds)
2nd: Rose (36.5 seconds)
3rd: David (43.7 seconds)
4th: Norbu (44.7 seconds)
5th: JT/Ty (1 minute 19.8 seconds)
6th: Natalia (1 minute 25.6 seconds)
7th: Alex (2 minutes 11.6 seconds)
For the intersecting, curved track (with touches to fix counted as a penalty):
1st: Kyle (49.0 seconds + a penalty)
2nd: Alex (51.6 seconds)
3rd: David (1 minute 0.1 seconds)
4th: JT/Ty (1 minute 26.4 seconds )
5th: Andrew (1 minute 30.6 seconds + 2 penalties)
Anyway, great job, everyone!
This month (March), we're meeting on the 31st, back in our normal room,
Michelangelo, which is next door to the room we met in last meeting.
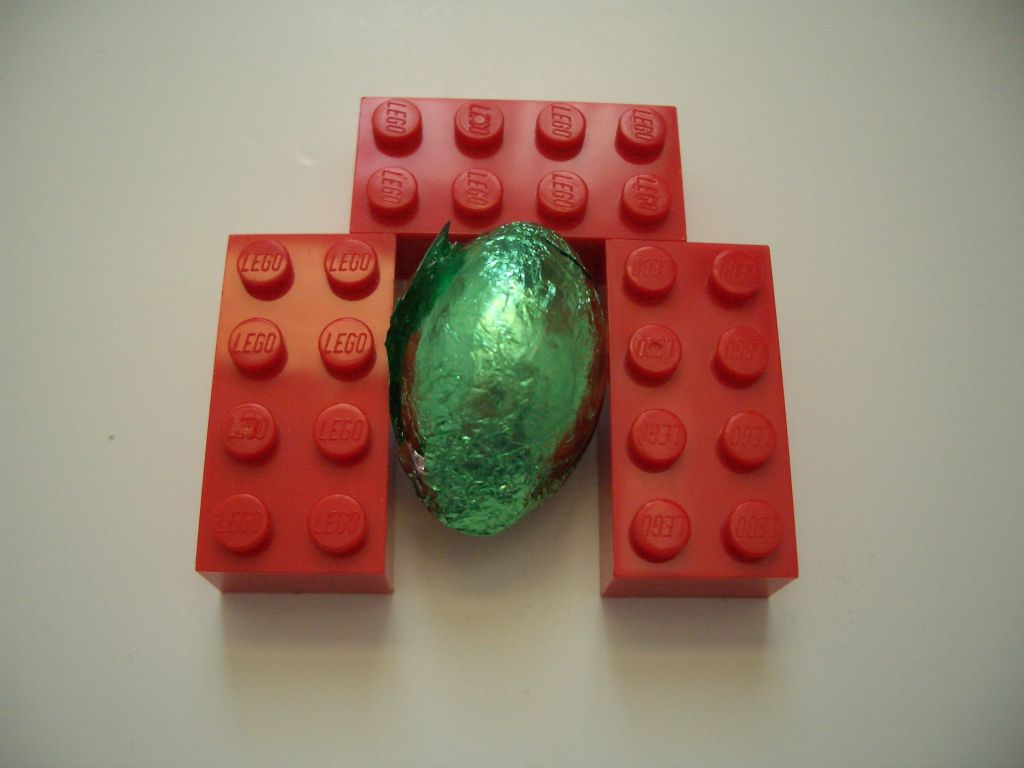
The mini-challenge we decided on was Easter Egg Hunt. Build a robot that can
find and dump the little foil-wrapped chocolate Easter eggs from Hershey. Here
are what they look like, with some bricks for size in the second & third
pictures:
http://www.brickshelf.com/gallery/David/SMART/Samples/Arenas/hersheysbag.jpg
http://www.brickshelf.com/gallery/David/SMART/Samples/Arenas/groupofeggs.jpg
http://www.brickshelf.com/gallery/David/SMART/Samples/Arenas/oneegg.jpg
The arena will be a white bottom, 4'x8' rectangle, with 2" high walls. Robots
should somehow pick up the eggs (taking care not to unwrap them), and drop them
over the wall, preferably in the corners.
Here's a picture of a previous time we did this:
http://www.brickshelf.com/gallery/David/Shows/SMART2008/cimg1952.jpg
See you in a couple of weeks!
--
David Schilling
|
|
| |
We had a great meeting last Saturday; a huge turnout! Thanks to everyone who
came! If you’re new, and have questions, don’t hesitate to ask.
For our February 25th meeting (also at Digipen, and also in the van Gogh room)
we voted on line-track racing as our mini-challenge. As usual, build to whatever
level of difficulty you like. You don’t have to build a ‘racer’ if you don’t
want. We like to keep these challenges as friendly as possible. Sometimes being
competitive isn’t what people want. If you want to bring your own line, that’s
okay. But if you prefer to use our “standard” line, here are the technical
details:
The line will be 1”-wide blue masking tape on a white board. Sections will be at
least 6” long, and the maximum angle between sections of tape will be 45-degrees
(ie: half of a 90-degree turn). There CAN be intersections, but they will be at
90-degrees. You should go straight through these intersections.
<http://www.brickshelf.com/gallery/David/SMART/Samples/Arenas/line-track-parameters.png>
In addition, please bring any big ball contraptions that you are working on.
I’ve got a couple, and also several more that I’ve been thinking about. It would
be cool to put them all together to see how they work, just moving balls from
one end of a table to another.
--
David Schilling
|
|
| |
Happy New Year, and happy 12th anniversary, SMART! Our next meeting is in two
weeks, on January 28th, at Digipen. The Michelangelo room is unavailable, so
we'll be meeting in the Van Gogh room instead.
Our mini-challenge is a repeat of the rope crossing challenge, which most people
attending last meeting wanted to repeat. Of course, any other robot you'be been
working on is also welcome!
See you in two weeks, and don't forget the room change!
--
David Schilling
|
|
| |
The next SMART meeting is December 10th, from 2-5pm, at Digipen.
The mini-challenge is to build a robot that can cross the gap between two
tables. There will be a taut rope going over the tops of the two tables.
See you then!
--
David Schilling
|
|
| |
Just a reminder about the upcoming SMART meeting this Saturday, from 2-5pm, at
DigiPen. The mini-challenge is to build a robot that can throw a LEGO "pumpkin"
as far as possible, or as accurately as possible. The "pumpkin" can be any LEGO
element, or elements put together.
To prevent damage to anything or anyone, your robot must be built entirely out
of LEGO. No storing energy in hundreds of rubber bands, or using 50 feet of
string as a slingshot, for example! Make sure what you build is safe, and know
ahead of time what the maximum range, and likely target radius of your device
is.
Looking forward to seeing everyone there!
--
David Schilling
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}